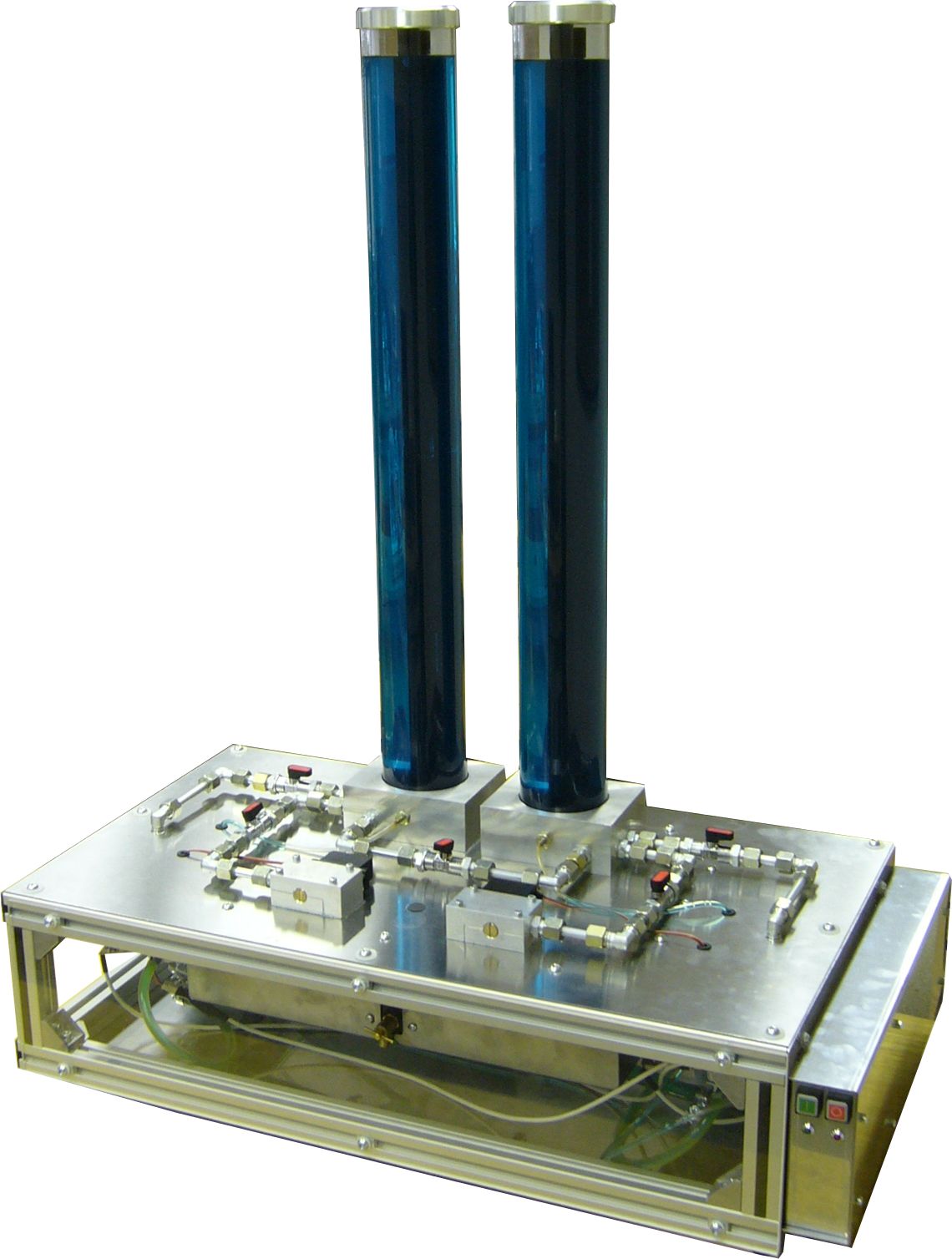
Model je tvořen soustavou dvou průhledných válcových nádob na kapalinu. Řídicí systém udržuje výšku hladin ve dvou válcových nádobách podle zadání a to jednak pomocí dvou řízených čerpadel a jednak řízením odtoku z těchto nádob. Napouštění a vypouštění je vybaveno mechanickými ventily, které mohou sloužit např. pro simulaci poruchy. Kontinuální měření výšky hladiny kapaliny v nádobách je zajištěno tlakovými čidly. Rychlost napouštění se měří za pomocí impulsních průtokoměrů.
Výška válce je cca 680 mm s vnitřním průměrem 72 mm a o objemu cca 2,6 L. Při maximálním výkonu čerpadla se válec naplní do třech minut.
Elektronika modelu je realizována s využitím mikrokontroléru LPC1754 (Cortex-M3) od společnosti NXP a je propojena s nadřazeným řídícím systémem pomocí sériového rozhraní RS232 nebo využitím analogových a digitálních vstupů (výstupů) PLC nebo iPC.
Program pro procesor je vytvořen s využitím programovacího jazyka „C“.
Vybavení
- 2x tlakové čidlo
- 2x regulovatelný ventil pro řízení vypouštění ze zásobníků
- 5x ruční uzavírací ventily
- 2x rotační čerpadlo
- 2x impulsní průtokoměr
- 2x tlačítko
- 2x LED dioda
- Elektronika
- Zdroj 12 V DC