|
Základní úlohou tohoto modelu je řešení polohovacích aplikací - Motion control. Student musí
zajistit vzájemnou synchronizaci ozubených kol. Otáčky pohonů se dají plynule měnit podle
požadavků na rychlost otáčení. Vzájemný pohyb synchronních pohonů k sobě a od sebe zabezpečují
po lineární dráze další pohony.
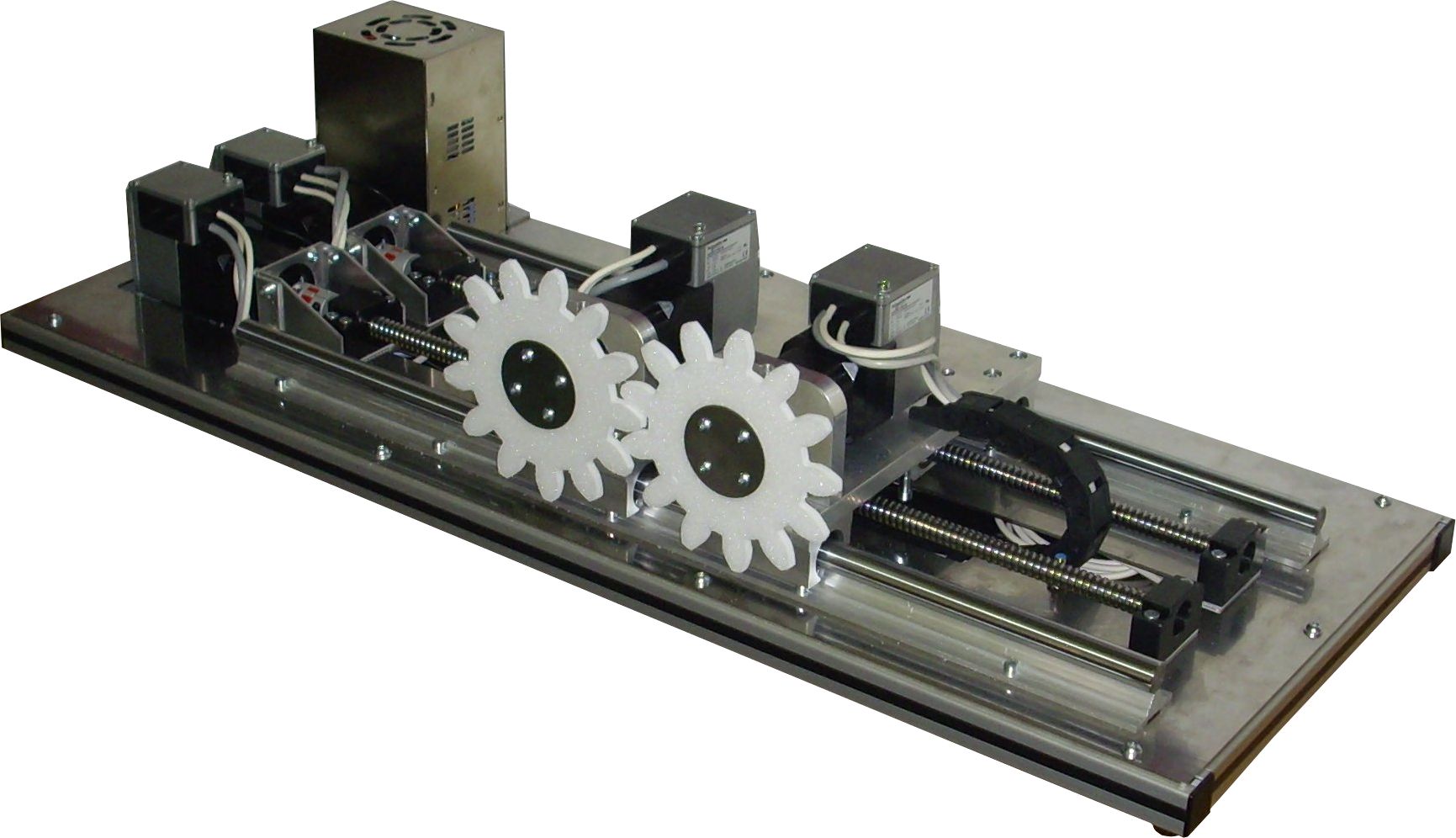
Model je tvořen čtyřmi synchronními servomotory na nichž bude vidět jejich vzájemná součinnost a
synchronizace. Komunikace mezi motory a iPC je vytvořena pomocí sběrnice EtherCAT. Sběrnice pracuje v reálném čase. Využívá optimalizovaný protokol uvnitř standardního ethernetového rámce.
Řízení motorů je prováděno pomocí řídícího software TwinCAT od společnosti BeckHoff.
Vybavení
- 4x synchronní servomotor ILA2E571TB1A0 se zabudovanou výkonovou a řídicí jednotkou
- Lineární dráha umožňující pohyb obou pohonů
- Ozubená kola o průměru 16 cm>Mechanika
- Ovladač s tlačítky, LED signálkami a stop tlačítkem
- 2x referenční indukční senzor - spínací
- 2x koncový indukční senzor – rozpínací
- Zdroj 24V 20A
|